Langage Python avec Nanpy
Arduino Uno R3
Qu’est-ce que Nanpy ?
Nanpy est une librairie pour Python utilisée pour le pilotage d’une carte Arduino par le port USB d’un ordinateur programmé en Python.
Avertissement
Il est important de retenir que Nanpy ne permet pas un fonctionnement autonome de la carte Arduino puisque le carte doit-être constamment connectée à l’ordinateur sur lequel le programme Python est exécuté !
Principe de fonctionnement
La carte Arduino a été préalablement programmer avec le micro-logiciel Nanpy-firmware téléversé à partir du logiciel Arduino. Ce firmware est un programme particulier (écrit en langage Arduino C/C++) qui gère le protocole de communication entre le programme Python exécuté sur l’ordinateur et la carte Arduino.
Téléversement du firmware Nanpy sur la carte Arduino
Il faut d’abord installer le firmware dans les croquis du logiciel Arduino.
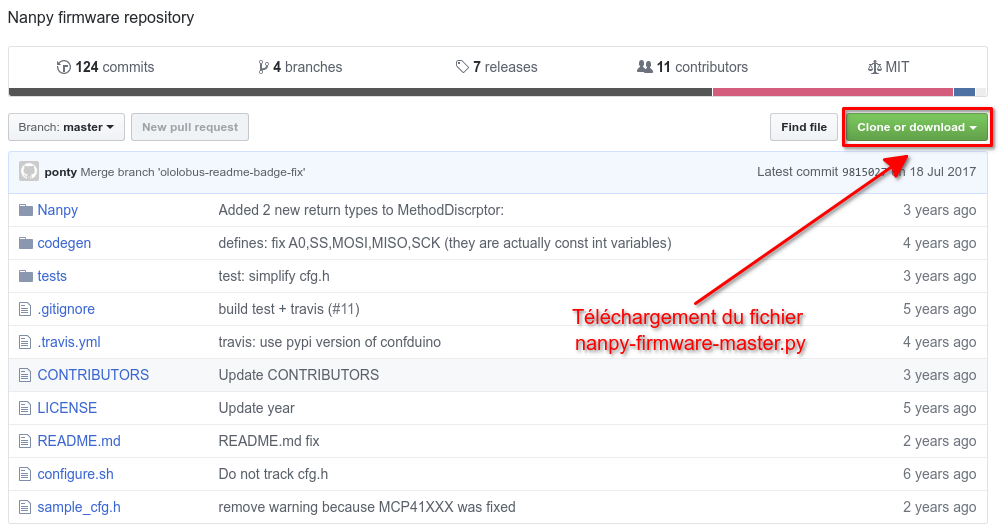
Le fichier nanpy-firmware-master.zip est à télécharger sur le site https://github.com/nanpy/nanpy-firmware.
Puis il faut procéder dans l’orde suivant :
extraire l’archive
nanpy-firmware-master.zipdans le répertoire de travail Arduino ;aller dans le répertoire
nanpy-firmware-mastercopier le fichier
sample_cfg.hdans le répertoireNanpy;pour finir, renommer le nouveau fichier
sample_cfg.hencfg.f.
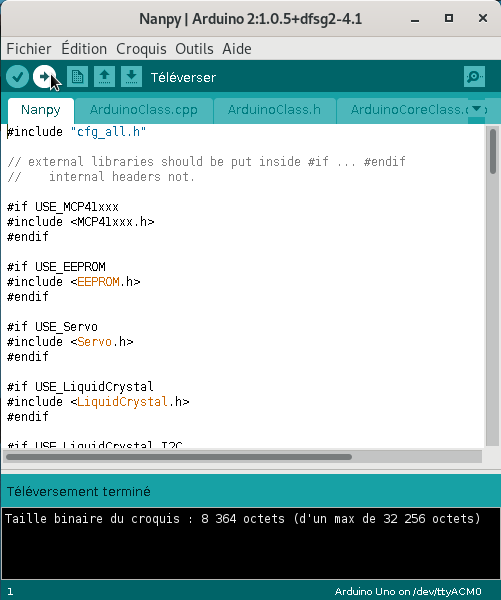
Ensuite, il faut procéder au téléversement du croquis du firmware sur la carte Arduino.
Dans le logiciel Arduino, ouvrir le carnet de croquis Nanpy.ino à partir du répertoire Nanpy.
Puis téléverser le programme sur la carte Arduino.
La carte est maintenant prête pour un fonctionnement avec Nanpy !
Avertissement
Ne pas oublier de sélectionner le type de carte (ex. Arduino Uno) et le port de communication série (ex. COM3) dans le menu Outils avant le téléversement du firmware !
Installation la librairie Nanpy sur l’ordinateur
L’installation dépend de la distribution Python utilisée sur l’ordinateur. La librairie Nanpy peut-être installée par défaut.
Si ce n’est pas le cas, il faut installer manuellement à partir du dépôt internet Pypi (https://pypi.org/project/nanpy/) avec la commande pip :
python -m pip install nanpy
Ou bien à partir de l’archive Zip nanpy-master.zip téléchargée sur le site Github de Nanpy (https://github.com/nanpy) :
python -m pip install nanpy-master.zip
Avertissement
L’archive Zip doit être enregistré dans le répertoire où la commande pip a été exécutée.
Exemple : le programme Blink
Voici un exemple du programme Blink en Python.
from nanpy import ArduinoApi, SerialManager # Fonctions de Nanpy
from time import sleep # Importation fonction sleep()
port = SerialManager(device='COM3') # Sélection du port série (exemple : device = 'COM6')
uno = ArduinoApi(connection=port) # Déclaration de la carte Arduino Uno
pinLed = 13 # Led intégrée sur broche 13
uno.pinMode(pinLed,uno.OUTPUT) # Broche Led en sortie
for i in range(100): # Boucle : répéter 100 fois
uno.digitalWrite(pinLed,1) # Led allumée
sleep(1) # Attendre 1 s
uno.digitalWrite(pinLed,0) # Led eteinte
sleep(1) # Attendre 1 s